{kind=link}
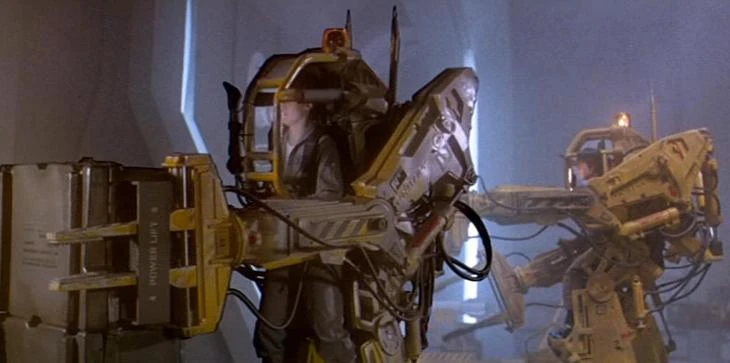
The Caterpillar P-5000 Powered Work Loader is a mechanized exoskeleton used for lifting and moving heavy objects such as crates and vehicular ordnance. Power loaders are equipped with hydraulic claws similar to those used on forklifts, one joint of each claw is placed under the package, while the other joint clamps down on top of the package so it remains secure. It is one of the many vehicles employed by the Colonial Marine Corps.
It was selected by the US Colonial Marines as their prime loader vehicle for logistic and support operations. Configured as an anthropomorphic exoskeleton power frame, the P-5000 offers unprecedented flexibility when handling ordinance and cargo during rough field operations, or when conducting heavy maintenance away from fixed workshops. Capable of manipulating loads up to 4000 kg, the P-5000 is a rugged and reliable alternative to conventional forklifts, rigs and cranes.
Depiction[]

{kind=link}
The chassis of a P-5000 is a reinforced steel framework with two upper load bearing points for the arms. A hydrogen fuel cell is mounted on the back of the frame, providing up to 65 kW of power for the loader. The articulated legs are attached by two semi-universal bearings to either side of the chassis, allowing up to 60 degrees of 'x' axis (hip swivel) movement; just below these are a set of knee bearings. Leg motions at the hip are controlled by a pair of 20kW linear motors actuated via a fast-feedback loop slaved to the operator’s movements. Below the hip, hydraulic actuators extend from the main load-bearing points to the aft sections of the legs, providing 'z' axis (fore/aft) movement at the knee joints while pitch control is handled by a second series of actuators at the ankles. To prevent toppling while stationary and under load, the chassis is gyrostabilised. These gyros can be rotated rapidly out of phase in order to 'decouple' the chassis stabilization system along the determined axes of motion and provide the necessary instability required for bipedal movement. For very heavy lifting work, additional stability can be provided by bolting up to 250 kg of concrete ballast to the underside of the chassis.
To work a powerloader, an operator first backs into the machine, buckling themselves in with the webbing harness. A roll cage is pulled down to provide protection for the head and torso, while feet are snapped into straps. Powerup and system diagnostics are handled by a punch keypad built into the operator's handgrips. There are also controls to operate a built in welder on the control panel. When powered up, the 'loader' is slaved to the operator's limb movements, duplicating their walking and lifting motions almost exactly. Response time to operator input is almost instantaneous, while sophisticated computer controls dampen any system induced 'twitches' or oscillations that arise out of involuntary operator movement. Problems are only likely to arise if the loader is walking or reaching at full extension, as the system is likely to enhance movement beyond the fine-tuning capabilities of the operator. Standard operating procedures usually forbid operators from performing such maneuvers. If operating over rough ground, the powerloader will provide feedback cues to the operator to help keep his or her footing. Automatic lockout systems will generally prevent any movement that will topple the 'loader', and the system has generally proved safe to use over all but the most treacherous terrain. It must be noted that there are strict guidelines for weight limits that the loader can handle and failure to adhere to these can cause the 'loader' to topple.
Though simple in principle, considerable practice is required to use a powerloader efficiently and safely, and the equivalent of a Class 2 civilian cargo handling license is needed to operate in USCM service. Operators must become used to the loaders mass and its tendency to 'lead' the operators movements. Operators must be careful not to overcompensate for this tendency, otherwise they may induce unwanted oscillations into the control systems. To operate a 'loader' requires sureness and economy of movement, since hesitancy and exaggerated motion tend to place undue stress on the load-bearing joints. Training to use a powerloader takes about six weeks in a simulator and 'hands-on' experience, though this is extended to eight weeks to qualify USCM personnel and includes training in rough field operation.
Behind the Scenes[]

{kind=link}
Power loader arm concept by James Cameron.